
博物館概要
HOME » 博物館概要 | 職員 » 藤原 慎一
職員
 藤原 慎一 / FUJIWARA, Shin-ichi
藤原 慎一 / FUJIWARA, Shin-ichi
■専門
- 機能形態学
- 解剖学
- 古脊椎動物学
■研究内容
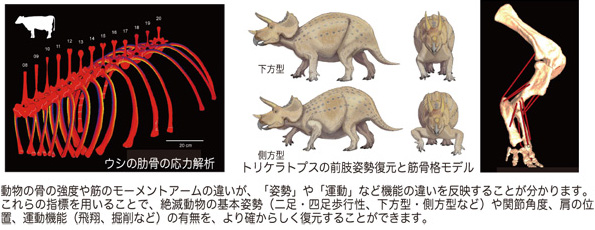
動物の筋骨格形態は、一見同じような相同な器官であっても、その機能は実に多様です。特に四肢動物と呼ばれる手足を備えた脊椎動物の一群の前肢は、様々な姿勢での歩行・走行や木登り、飛翔、掘削、遊泳と、その運動機能の劇的な多様化に成功しました。この運動機能の多様化が、四肢動物を地上や樹上、空中、地中、水中といった様々な環境への進出を後押ししたことは確かです。しかし、動物の持つ筋骨格形態と運動機能の関係については、まだ明らかにされていないことが数多く残されています。
私は特に四肢動物の前肢に着目し、下記に挙げたテーマについて、前肢の運動機能と筋骨格形態の関係を探っています。運動機能の多様性を筋骨格形態から得られる力学的指標によって整合的に説明することで、動物の筋骨格形態がその運動機能に対してどれだけ適応しているかをはかることができるようになると期待されます。また、このような知見を増やしていくことで、絶滅動物の運動機能もより確からしく復元することができるようにもなると期待され、最終的には四肢動物の前肢の運動機能の進化のプロセスを解明していくことを目指しています。
テーマ:
- 肩帯の位置と胸郭形態の関係― 肩帯(前肢骨格の近位端)と体幹の位置関係は、関節を介在せず、ただ筋によってつなぎとめられているだけにも関わらず、互いの位置関係は決まっています。この位置関係を決定する骨格の形態的指標とその仕組みを探っています。
- 関節角度と骨格形態の関係― 肩や肘の関節は広い可動域を持つにも関わらず、四足歩行姿勢やナマケモノのようなぶら下がり姿勢では支持脚の関節角度はある一定の範囲に収まります。その角度が筋骨格形態からどのような仕組みによって決定されるのかについて探っています。
- 側方型と下方型、匍匐型それぞれの姿勢をとる動物の骨格形態の違い― 四足歩行性の動物の前肢姿勢は実に多様で、陸上でトカゲのように肘を張り出す側方型姿勢や、肢を体幹の真下に置く下方型姿勢、ナマケモノのように腹部を引きずって進む匍匐型姿勢などがあります。この姿勢の違いが筋骨格形態のどこに現れ、なぜその違いが生まれるのかについて探っています。
- 関節面の形態と関節の運動軸の関係― 特に爬虫類や両生類、そして家畜動物以外の哺乳類について、関節の運動軸の位置や自由度をはかり、それらを示す形態的指標が骨格形態に現れるかどうかについて探っています。
- 飛翔機能や掘削機能、木登り機能の進化― 四肢動物は前肢の機能を多様化させて多様な生息環境へ進出しましたが、進化のどの段階でそれらを獲得したかは分かっていません。これら特殊な運動機能を行なうためにどのような筋骨格形態を獲得する必要があったかについて探っています。
- 絶滅四肢動物の前肢姿勢復元― トリケラトプスをはじめとする角竜類恐竜や絶滅哺乳類のデスモスチルスや地上性ナマケモノ、哺乳類へと至る基盤的単弓類などは前肢の姿勢復元が長く論争の的となってきました。これらの前肢姿勢のより確からしい復元を根拠とともに提唱し、前肢進化の過程を明らかにすることを目指しています。
■所属学会
- 日本古生物学会
- 日本哺乳類学会
- Society of Vertebrate Paleontology